
平视显示器(HUD)技术是汽车市场上最大的增长领域之一,主要专注于通过改进车辆驾驶方式和提高驾驶者意识来提升乘客安全度。调查显示,HUD技术目前已取得21.67%的复合年增长率(CAGR),预计到2021年将实现13.3亿美元的市场规模。这一增长很大程度上源于显示器技术的进步,该技术成功做到了将光线投射到远景上。同时,这也与增强现实(AR)技术应用领域的进步有关,该技术能够将虚拟图像叠加到现实环境中,用于实时显示的驾驶情况信息。

图1 跟AR显示器一样,HUD投影必须在精确位置上清晰可见,确保能够投射到远景上。通过确保HUD图像位置、色彩、亮度和清晰度的正确性,可以强化驾驶者对周围环境的感知,尽可能减少可能引起驾驶者分心的失误。
跟任何其他显示器一样,视觉性能对HUD系统的功能至关重要。精确的系统设计和最终的质量控制检测可以确保投影位置,对焦,驾驶者观察能够看清,并且光线和色彩足够生动,驾驶者能够在任何照明条件下将其与周围环境区别开来。低质量的投影不仅会损害制造商的品牌声誉,而且驾驶者在投影质量不佳的情况下无法观察显示器时,会使乘客处于危险之中,这可能会导致驾驶员对信息的误判、重要环境数据(如导航、物距以及其他提醒)丢失以及驾驶员分心。
由于质量不佳的系统可能给消费者造成巨大的安全隐患,各种车载HUD性能标准已相继出台,旨在确保制造商根据质量和安全基准阈值对其生产的HUD进行评估。SAE J1757-1(“车载显示器标准测量方法”)和 ISO 15008(“道路车辆—运输信息和控制系统的人体工程学方面—车载视觉呈现的规范和测试程序”)是美国采用的两种标准方法,概述了汽车HUD的质量测试准则。
作为有效的质量控制解决方案,显示器测试和亮度测量系统发挥了很大的作用,可确保制造商符合这些标准的测试方法,但测量系统性能和光学结构的不同可能会导致不同的制造商之间存在质量差异。出于此原因,美国将于2017年夏季发布新的标准,进一步控制用于评估HUD质量的测量系统。本白皮书将为大家概述最新版 SAE J1757-2标准4的要求,并介绍一些获得业界认可的HUD测量方法,希望能够帮助制造商符合最新的SAE和ISO质量标准。本白皮书还将重点介绍自动化测量系统的功能和优势,帮助制造商在测量应用中实现最佳时间和成本效益。
SAE J1757-2汽车HUD光学测量标准
HUD显示对安全驾驶的重大影响已经促使汽车测试和测量设备制造商与美国汽车工程师学会(SAE)展开合作,根据SAE J1757-1标准和 ISO 15008 标准制定测量方法,用于评估HUD的显示质量。新的标准(SAE J1757-2“汽车HUD光学测量”)将于2017年夏末出台,为车辆HUD的测量提供光学测量结构和方法,并明确相关要求,包括AR-HUD(增强现实平视显示器)性能。标准化测量方法将确保虚拟图像相对于驾驶者双眼的准确投射(包括景深(DOF)、视场(FOV)、屈光度、焦距、图像位置和图像距离)、HUD虚拟图像在典型环境光线条件下的可识别性(需要进行亮度、色度、均匀性和对比度测试)以及通过与目标虚拟图像的点偏差来测量HUD的图像失真、像差和重影程度。这些测量需要根据NIST美国国家标准与技术研究院的规定对光学测量设备或仪器进行标定,并且要求将这些设备或仪器置于驾驶员眼椭圆视野区域内的多个测量点来进行测量(确保考虑到潜在可视角范围)。
所有需要符合 SAE J1757-1 标准和 ISO 15008 标准的HUD制造商和汽车品牌,都必须根据新的 SAE J1757-2 HUD测量方法来设计自己的测量系统。虽然标准并没有指定使用什么类型的测量系统,但市场上目前供应的符合SAE标准的系统在功能上存在一些区别,因此在改进设置和应用方面的能力也会存在差异。先进的成像系统提供自动化测量功能,有助于缩短测量时间,降低测量难度,优化设计和质量控制流程,从而让制造商能够减少投资,加快产品上市速度。在HUD测量应用中,为确保完全符合SAE标准,制造商需要对HUD的每个特征进行多次测量,因此自动化系统将会有很大的发挥。
符合SAE标准的HUD测量系统
常见的方法
点式亮度计
点式亮度计的设计原理是测量在一个显示区域内的一个小点反射或发射的光线。点式亮度计提供高精度的亮度和色度测量,但由于取点测量区域非常小,因此它们无法通过一次测量对整个显示器的均匀性、对比度、亮度和色度进行评估。为了解决这个问题,采用点式亮度计对显示器进行自动化测量时,制造商必须额外使用其他设备,如传动装置或机械臂,确保能够将点式亮度计架设在三轴测试平台内测量显示屏每个点。然后,点式亮度计在每个点采集亮度和色度数据,然后对这些数据进行比较,以评估整个显示器的均匀性、对比度以及其他测量参数。对于HUD测量应用而言,这是一种可接受的解决方案,但要实现自动化测量(在生产线上),考虑到成本和复杂性,因此搭配点式亮度计的解决方案并不理想。
除了亮度值和均匀性测量之外,SAE J1757-2 标准还要求对HUD远景平面内所投影物体的位置、距离和图像完整性进行评估。点式亮度计无法采集二维图像,因此无法基于构成图像的整个像素区域来分析所投影物体的范围、尺寸和形状。出于此原因,点式亮度计无法精确地反映所投影物体的特征,也无法量化整体均匀性、对比度以及与目标图像存在的倾斜度、失真度和重影度偏差。制造商必须额外使用一些设备来对点式亮度计进行补充,以完成该标准要求的所有测试。
机器视觉相机
机器视觉相机是一种二维成像解决方案,用来定位和测量显示器中的图像,分析图像中相邻像素点和对比区域的亮度与色度。机器视觉相机对点式亮度计是很好的技术补充,即提供点式亮度计无法独立实现的测量功能,比如基于像素计算或局部区域位置(如文本的光学字符识别(OCV))来评估物体的状、尺寸、失真度、重影度或其他特征。但机器视觉相机无法单独执行所有HUD测量任务。如果将点式亮度计与机器视觉相机结合在一起创建一套解决方案,通过利用点式亮度计的测量精度与机器视觉相机的快速成像能力、测距与定位能力,可以实现对HUD的全面评估。
人工检测员
人工检测一直在HUD测量流程中发挥作用的原因有多种,主要原因在于测量验证的需要。人工检测能够极其快速地对显示器质量作出判断,只需看一眼就能对整个显示器进行评估,同时还能运用背景(而非具体亮度值)来确定可接受性。相比之下,点式亮度计必须在显示器图像中采集多达九个测量点的数据,来对亮度、色彩和所测量光线的其他特征进行比较,使得这种解决方案在设置、执行和分析方面十分耗时。人工检测速度极快,这有助于执行多项HUD测量,包括对HUD中所投影图像的对比度进行评估。该评估是通过比较HUD系统所投影的黑白图像的黑暗区域与发光区域来执行的。人工检测员通过对图像进行主观评估,或者比较一系列基准数字化测量,就能够确定图像对比度是否可接受,无需执行任何计算。
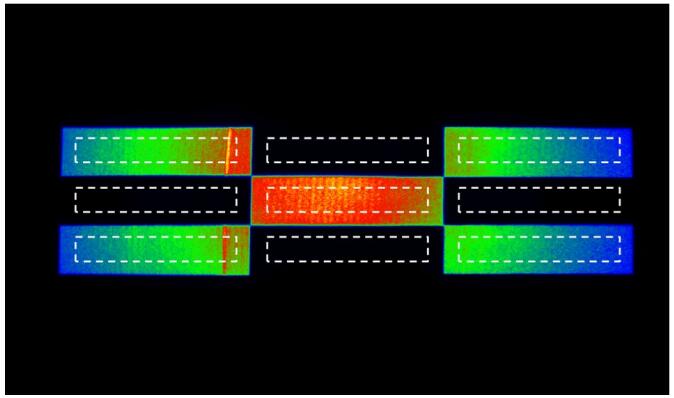
图2 - 使用亮度测量软件对HUD系统投影的棋盘格测试图案进行分析,然后将发光区域的平均亮度值除以黑暗区域的平均亮度值,来计算对比度。但人工检测员可能无需进行任何计算就能作出量化判断。








